


Autopilot Sophistication and Interfaces
By Mick Kaufman
In this issue of BPT TAKEOFF, I will cover a topic that has always sparked interest among our readers, and that is, autopilots.
Over the years of writing training articles — and especially after doing a series on autopilots for another publication — I continue to receive e-mails and phone calls from readers with questions on autopilots. Occasionally, we get challenged and get to fly the autopilot in the pilots’ aircraft to try to figure out what is happening or to better train the pilot on the use of his autopilot. One of these flights happened with a former instrument student of mine, Rolf Berg from Menomonee Falls, Wisconsin. Rolf is the proud owner and builder of an Epic turbo prop.
The Epic can truly be considered the KING of the single engine turboprops being about 70kts faster than the closest competition and is as docile as a Bonanza on the approach. I was extremely impressed with the aircraft and Rolf’s skills in flying it. Rolf had some issues with the autopilot not capturing the glide-slope consistently on the approach, and our goal was to find the answer to what was happening. The autopilot is a TruTrac Sorcerer, and it was interfaced to a Garmin G900X GPS/FMS. This was my first experience with this GPS/autopilot configuration in any aircraft.
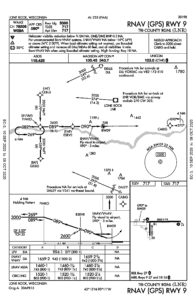
After departing the Lone Rock, WI airport on runway 09, we used the altitude preselect to set a climb to 3,500 feet. We had preprogrammed in the RNAV/GPS 09 approach (See Chart) for our first approach and selected FINKO as our initial approach fix (IAF) and selected GPSS on the autopilot for tracking. The aircraft climbed to 3,500 feet and leveled off and proceeded to make a turn toward FINKO with the GPSS mode engaged on the autopilot.
As the aircraft passed abeam the missed approach point, the glide-slope engaged and the aircraft altitude began to fluctuate. We pushed the altitude hold to stop the fluctuation and the altitude held steady but the glide-slope mode did not engage at the proper point once established inbound on the approach.
We attempted the same approach two more times using CEBLU & GESLE respectively as the IAFs (FIG 1). We tried activating the approach at different points and activating vectors to final once established inbound; but still NO LUCK. I attempted several things that have worked for me with other autopilots, but that did not work.
So, I read the autopilot manual.
A paragraph in the manual prompted us to activate the GPSS function of the autopilot while in the in altitude hold with the approach activated and this worked. So, the conclusion of our quest was that the GPSS mode must be engaged only while in altitude-hold mode of the autopilot. If you were climbing or descending while activating GPSS mode, the glide-slope capture would not engage. If you had activated GPSS while in a climb or descent, it was necessary to disengage and re-engage GPSS in altitude hold mode.
For lessons learned, you may not have a TruTrac autopilot coupled to a Garmin 900X, in a Bonanza or Baron but the point to be made is “learn and know your system well”. Never depart into serious IMC weather in an aircraft that you do not know well or one that has had recent maintenance.
From years of experience, I have seen so many accidents on the way home with a newly purchased or an unfamiliar aircraft or systems unfamiliar to the pilot; play it safe get professional training.
As an instructor for over fifty years, I have seen a lot of changes in the way we fly instruments with multiple levels of automation from hand flying using VOR’s and ILS approaches to programming an entire flight on an FMS and letting the autopilot do the work for us. It can be debated by many but lets assume there are three levels of automation and at some time we may have do downgrade to the primary level of automation and had fly an ILS approach.
For this column, let’s assume we have an approach loaded into the flight plan of our Garmin or Avidyne navigator, and we were going to edit it and fly it. If we have activated the approach and we think our workload is over until we get a call from ATC with a change in the approach. If we are on the autopilot on the way to the IAF, we will need to think about the basics our airspeed and altitude and getting the new approach loaded and review it.
How are your button-pushing skills? The air is rough and should you have a touch screen to type on. Good luck. You might ask ATC for a heading and altitude to fly while you change the approach using your autopilot in heading and altitude mode to fly. If this should be an ILS approach and you are getting vectors, it is easy. All you need is the ILS frequency and follow the assigned vectors for the approach.
Some years ago, while checking out an airline pilot in his recently purchased Bonanza with a Garmin 530/430, this situation happened. The pilot downgraded sophistication to level one basic, dialed in the localizer, disconnected the autopilot and flew the approach. There are a lots of quirks in sophisticated avionics — as in the above-mentioned TruTrac Sorcerer interfaced to a Garmin G900X GPS/FMS.
Until you know your airplane, equipment and installation or after maintenance or upgrades, don’t fly in IMC and always revert to the basic “level one” when the situation warrants it.